Положения центра тяжести некоторых фигур. Способы определения координат центра тяжести
– вычислению центра тяжести плоской ограниченной фигуры . Многие читатели интуитивно понимают, что такое центр тяжести, но, тем не менее, рекомендую повторить материал одного из уроков аналитической геометрии , где я разобрал задачу о центре тяжести треугольника и в доступной форме расшифровал физический смысл этого термина.
В самостоятельных и контрольных заданиях для решения, как правило, предлагается простейший случай – плоская ограниченная однородная фигура, то есть фигура постоянной физической плотности – стеклянная, деревянная, оловянная чугунные игрушки, тяжёлое детство и т.д. Далее по умолчанию речь пойдёт только о таких фигурах =)
Первое правило и простейший пример : если у плоской фигуры есть центр симметрии , то он является центром тяжести данной фигуры . Например, центр круглой однородной пластины. Логично и по-житейски понятно – масса такой фигуры «справедливо распределена во все стороны» относительно центра. Верти – не хочу.
Однако в суровых реалиях вам вряд ли подкинут сладкую эллиптическую шоколадку , поэтому придётся вооружиться серьёзным кухонным инструментом:
Координаты центра тяжести плоской однородной ограниченной фигуры рассчитываются по следующим формулам :
 , или
:
, или
:
 , где – площадь области (фигуры); или совсем коротко
:
, где – площадь области (фигуры); или совсем коротко
:
![]() , где
, где
Интеграл будем условно называть «иксовым» интегралом, а интеграл – «игрековым» интегралом.
Примечание-справка
: для плоской ограниченной неоднородной
фигуры, плотность которой задана функцией , формулы более сложные:
 , где
, где ![]() – масса фигуры;
в случае однородной плотности они упрощаются до вышеприведённых формул.
– масса фигуры;
в случае однородной плотности они упрощаются до вышеприведённых формул.
На формулах, собственно, вся новизна и заканчивается, остальное – это ваше умение решать двойные интегралы , кстати, сейчас предоставляется прекрасная возможность потренироваться и усовершенствовать свою технику. А совершенству, как известно, нет предела =)
Закинемся бодрящей порцией парабол:
Пример 1
Найти координаты центра тяжести однородной плоской фигуры, ограниченной линиями .
Решение : линии здесь элементарны: задаёт ось абсцисс, а уравнение – параболу, которая легко и быстро строится с помощью геометрических преобразований графиков :
– парабола , сдвинутая на 2 единицы влево и на 1 единицу вниз.
Я выполню сразу весь чертёж с готовой точкой центра тяжести фигуры:
Правило второе
: если у фигуры существует ось симметрии
, то центр тяжести данной фигуры обязательно лежит на этой оси
.
В нашем случае фигура симметрична относительно прямой , то есть фактически мы уже знаем «иксовую» координату точки «эм».
Также обратите внимание, что по вертикали центр тяжести смещён ближе к оси абсцисс, поскольку там фигура более массивна.
Да, возможно, ещё не все до конца поняли, что такое центр тяжести: пожалуйста, поднимите вверх указательный палец и мысленно поставьте на него заштрихованную «подошву» точкой . Теоретически фигура не должна упасть.
Координаты центра тяжести фигуры найдём по формулам ![]() , где .
, где .
Порядок обхода области (фигуры) здесь очевиден:![]()
Внимание! Определяемся с наиболее выгодным порядком обхода один раз – и используем его для всех интегралов!
1) Сначала вычислим площадь фигуры. Ввиду относительной простоты интеграла решение можно оформить компактно, главное, не запутаться в вычислениях:

Смотрим на чертёж и прикидываем по клеточкам площадь. Получилось около дела.
2) Иксовая координата центра тяжести уже найдена «графическим методом», поэтому можно сослаться на симметрию и перейти к следующему пункту. Однако так делать всё-таки не советую – велика вероятность, что решение забракуют с формулировкой «используйте формулу».

Заметьте, что здесь можно обойтись исключительно устными вычислениями – иногда совсем не обязательно приводить дроби к общему знаменателю или мучить калькулятор.
Таким образом: , что и требовалось получить.
, что и требовалось получить.
3) Найдём ординату центра тяжести. Вычислим «игрековый» интеграл:

А вот тут без калькулятора пришлось бы тяжко. На всякий случай закомментирую, что в результате умножения многочленов получается 9 членов, причём некоторые из них подобны. Подобные слагаемые я привёл устно (как это обычно принято делать в похожих случаях) и сразу записал итоговую сумму .
В результате:  , что очень и очень похоже на правду.
, что очень и очень похоже на правду.
На заключительном этапе отмечаем на чертеже точку . По условию не требовалось ничего чертить, но в большинстве задач мы волей-неволей вынуждены изобразить фигуру. Зато есть безусловный плюс – визуальная и довольно эффективная проверка результата.
Ответ
: ![]()
Следующие два примера для самостоятельного решения.
Пример 2
Найти координаты центра тяжести однородной плоской фигуры, ограниченной линиями ![]()
Кстати, если вы представляете, как расположена парабола и увидели точки, в которых она пересекает ось , то здесь и на самом деле можно обойтись без чертежа.
И посложнее:
Пример 3
Найти центр тяжести однородной плоской фигуры, ограниченной линиями
В случае затруднений с построением графиков, изучите (повторите) урок о параболах и/или Пример №11 статьи Двойные интегралы для чайников .
Примерные образцы решений в конце урока.
Кроме того, десяток-другой похожих примеров можно найти в соответствующем архиве на странице Готовые решения по высшей математике .
Ну а я не могу не порадовать любителей высшей математики, которые часто просят меня разбирать и трудные задачки:
Пример 4
Найти центр тяжести однородной плоской фигуры, ограниченной линиями . Фигуру и её центр тяжести изобразить на чертеже.
Решение
: условие данной задачи уже категорично требует выполнения чертежа. А ведь требование не настолько и формально! – эту фигуру способен представить в уме даже человек со средним уровнем подготовки:
Прямая рассекает круг на 2 части, и дополнительная оговорка (см. линейные неравенства
)
указывает на то, что речь идёт именно о маленьком заштрихованном кусочке.
Фигура симметрична относительно прямой (изображена пунктиром), поэтому центр тяжести должен лежать на данной линии. И, очевидно, что его координаты равны по модулю . Отличный ориентир, практически исключающий ошибочный ответ!
Теперь плохая новость =) На горизонте маячит малоприятный интеграл от корня, который мы подробно разобрали в Примере №4 урока Эффективные методы решения интегралов
. И кто его знает, что там нарисуется ещё. Казалось бы, ввиду наличия окружности
выгодно , однако не всё так просто. Уравнение прямой преобразуется к виду ![]() и интегралы тоже получатся не сахарные (хотя фанаты тригонометрических интегралов
оценят). В этой связи осмотрительнее остановиться на декартовых координатах.
и интегралы тоже получатся не сахарные (хотя фанаты тригонометрических интегралов
оценят). В этой связи осмотрительнее остановиться на декартовых координатах.
Порядок обхода фигуры:![]()
1) Вычислим площадь фигуры:

Первый интеграл рациональнее взять подведением под знак дифференциала
:
А во втором интеграле проведём стандартную замену :
![]()
Вычислим новые пределы интегрирования:
2) Найдём .

Здесь во 2-м интеграле опять был использован метод подведения функции под знак дифференциала . Отработайте и возьмите на вооружение эти оптимальные (по моему мнению) приёмы решения типовых интегралов.

После непростых и длительных вычислений вновь обращаем свой взор на чертёж (помним, что точки мы пока не знаем! ) и получаем глубокое моральное удовлетворение от найденного значения .
3) Исходя из проведённого ранее анализа, осталось убедиться, что .

Отлично:
Изобразим точку ![]() на чертеже. В соответствии с формулировкой условия запишем её как окончательный ответ
:
на чертеже. В соответствии с формулировкой условия запишем её как окончательный ответ
: ![]()
Похожее задание для самостоятельного решения:
Пример 5
Найти центр тяжести однородной плоской фигуры, ограниченной линиями . Выполнить чертёж.
Эта задача интереса тем, что в ней задана фигура достаточно малых размеров, и если где-нибудь допустить ошибку, то высока вероятность вообще «не попасть» в область. Что, безусловно, хорошо с точки зрения контроля решения.
Примерный образец оформления в конце урока.
Иногда бывает целесообразен переход к полярным координатам в двойных интегралах
. Это зависит от фигуры. Искал-искал у себя удачный пример, но не нашёл, поэтому продемонстрирую ход решения на 1-й демо-задаче указанного выше урока:
Напоминаю, что в том примере мы перешли к полярным координатам
, выяснили порядок обхода области ![]() и вычислили её площадь
и вычислили её площадь
Давайте найдём центр тяжести данной фигуры. Схема та же: ![]() . Значение просматривается прямо из чертежа, а «иксовая» координата должна быть смещена чуть ближе к оси ординат, поскольку там располагается более массивная часть полукруга.
. Значение просматривается прямо из чертежа, а «иксовая» координата должна быть смещена чуть ближе к оси ординат, поскольку там располагается более массивная часть полукруга.
В интегралах используем стандартные формулы перехода:

Правдоподобно, скорее всего, не ошиблись.
Наиболее часто для нахождения центра тяжести тела или фигуры применяют следующие методы:
· метод симметрии;
· метод разбиения;
· метод отрицательных масс.
Рассмотрим приемы, применяемые в каждом из перечисленных методов.
Метод симметрии
Представим себе однородное тело, которое имеет плоскость симметрии. Выберем такую систему координат, чтобы оси x и z лежали в плоскости симметрии (см. рисунок 1) .
В этом случае каждой элементарной частице силой тяжести G i с абсциссой y i = +a соответствует такая же элементарная частица с абсциссой y i = -a , тогда:
y C = Σ(G i x i)/ΣG i = 0 .
Отсюда вывод: если однородное тело имеет плоскость симметрии, то центр тяжести тела лежит в этой плоскости.
Аналогично можно доказать и следующие положения:
· Если однородное тело имеет ось симметрии, то центр тяжести тела лежит на этой оси;
· Если однородное тело имеет две оси симметрии, то центр тяжести тела находится в точке их пересечения;
· Центр тяжести однородного тела вращения лежит на оси вращения.
Метод разбиения
Этот метод заключается в том, что тело разбивают на наименьшее число частей, силы тяжести и положение центров тяжести которых известны, после чего применяют приведенные ранее формулы для определения общего центра тяжести тела.
Допустим, что мы разбили тело силой тяжести G
на три части G"
, G""
, G"""
, абсциссы центров тяжести этих частейx" C , x"" C , x""" C
известны.
Формула для определения абсциссы центра тяжести всего тела:
x C = Σ(G i x i)/ΣG i .
Перепишем ее в следующем виде:
x C ΣG i = Σ(G i x i) или Gx C = Σ(G i x i) .
Последнее равенство запишем для каждой из трех частей тела отдельно:
G"x" C = Σ(G"x" i), G""x"" C = Σ(G"" i x"" i), G"""x""" C = Σ(G""" i x""" i) .
Сложив левые и правые части этих трех равенств, получим:
G"x" C + G""x"" C + G"""x""" C = Σ(G" i x" i) + Σ(G""x"" i) + Σ(G""" i x""" i) = Σ(G i x i) .
Но правая часть последнего равенства представляет собой произведение Gx C , так как
Gx C = Σ(G i x i) ,
Следовательно, x C = (G"x" C + G""x"" C + G"""x""" C)/G
, что и требовалось доказать.
Аналогично определяются координаты центра тяжести на координатных осях y
и z
:
y C = (G"y" C + G""y"" C + G"""y""" C)/G
,
z C = (G"z" C + G""z"" C + G"""z""" C)/G
.
Полученные формулы аналогичны формулам для определения координат цента тяжести, выведенные выше. Поэтому в исходные формулы можно подставлять не силы тяжести элементарных частиц G i , а силы тяжести конечных частей; под координатами x i , y i , z i понимают координаты центров тяжести частей, на которые разбито тело.
Метод отрицательных масс
Этот метод заключается в том, что тело, имеющее свободные полости, считают сплошным, а массу свободных полостей – отрицательной. Вид формул для определения координат центра тяжести тела при этом не меняется.
Таким образом, при определении центра тяжести тела, имеющего свободные полости, следует применять метод разбиения, но считать массу полостей отрицательной.
Практические методы определения центра тяжести тел
На практике для определения центра тяжести плоских тел сложной формы часто применяют метод подвешивания
, который заключается в том, что плоское тело подвешивают на нити за какую-нибудь точку. Прочерчивают вдоль нити линию, и тело подвешивают за другую точку, не находящуюся на полученной линии.
Затем вновь проводят линию вдоль нити.
Точка пересечения двух линий и будет являться центром тяжести плоского тела.

Еще один способ определения центра тяжести, применяемый на практике, называется метод взвешивания
. Этот метод часто применяется для определения центра тяжести крупных машин и изделий – автомобилей, самолетов, колесных тракторов и т. п., которые имеют сложную объемную форму и точечную опору на грунт.
Метод заключается в применении условий равновесия, исходя из того, что сумма моментов всех сил, действующих на неподвижное тело равна нулю.
Практически это осуществляется взвешиванием одной из опор машины (задние или передние колеса устанавливаются на весы), при этом показания весов, по сути, являются реакцией опоры, которая учитывается при составлении уравнения равновесия относительно второй точки опоры (находящейся вне весов).
По известной массе (соответственно – весу) тела, показанию весов в одной из точек опоры, и расстоянию между точками опоры можно определить расстояние от одной из точек опоры до плоскости, в которой расположен центр тяжести.
Чтобы найти подобным образом линию (ось), на которой расположен центр тяжести машины, необходимо произвести два взвешивания по принципу, изложенному выше для метода подвешивания (см. рис. 1а)
.
Вопрос 12
Момент инерции тела.
МОМЕНТ ИНЕРЦИИ - величина, характеризующая распределение масс в теле и являющаяся наряду с массой мерой инертности тела при непоступат. движении. В механике различают M. и. осевые и центробежные. Осевым M. и. тела относительно оси z наз. величина, определяемая равенством
где m i - массы точек тела, h i - их расстояния от оси z, r - массовая плотность, V - объём тела. Величина I z является мерой инертности тела при его вращении вокруг оси (см. Вращательное движение) . Осевой M. и. можно также выразить через линейную величину r z , наз. радиусом инерции относительно оси z, по ф-ле I z = M r 2 z , где M - масса тела. Размерность M. и.- L 2 M; единицы измерения -кг. м 2 .
Центробежными M. и. относительно системы прямоуг. осей х, у, z , проведённых в точке О , наз. величины, определяемые равенствами
или соответствующими объёмными интегралами. Эти величины являются характеристиками динамич. неуравновешенности тела. Напр., при вращении тела вокруг оси z от значений I xz и I yz зависят силы давления на подшипники, в к-рых закреплена ось.
M. и. относительно параллельных осей z и z" связаны соотношением (теорема Гюйгенса)
где z" - ось, проходящая через центр массы тела, d - расстояние между осями.
M. и. относительно любой проходящей через начало координат О оси Ol с направляющими косинусами a, b, g находится по ф-ле
Зная шесть величин I x , I y , I z , I xy , I yz , I zx , можно последовательно, используя ф-лы (4) и (3), вычислить всю совокупность M. и. тела относительно любых осей. Эти шесть величин определяют т. н. тензор инерции тела. Через каждую точку тела можно провести 3 такие взаимно перпендикулярные оси, наз. гл. осями инерции, для к-рых I xy = I yz = I zx = 0. Тогда M. и. тела относительно любой оси можно определить, зная гл. оси инерции и M. и. относительно этих осей.
Перед тем, как найти центр тяжести простых фигур, таких которые обладают прямоугольной, круглой, шарообразной или цилиндрической, а также квадратной формой, необходимо знать, в какой точке находится центр симметрии конкретной фигуру. Поскольку в данных случаях, центр тяжести будет совпадать с центром симметрии.
Центр тяжести однородного стержня располагается в его геометрическом центре. Если необходимо определить центр тяжести круглого диска однородной структуры, то для начала найдите точку пересечения диаметров круга. Она и будет центром тяжести данного тела. Рассматривая такие фигуры, как шар, обруч и однородный прямоугольный параллелепипед, можно с уверенностью сказать, что центр тяжести обруча будет находиться в центре фигуры, но вне ее точек, центр тяжести шара - геометрический центр сферы, и в последнем случае, центром тяжестью считается пересечение диагоналей прямоугольного параллелепипеда.
Центр тяжести неоднородных тел
Чтобы найти координаты центра тяжести, как и сам центр тяжести неоднородного тела, необходимо разобраться, на каком отрезке данного тела располагается точка, в которой пересекаются все силы тяжести, действующие на фигуру, если ее переворачивать. На практике для нахождения такой точки подвешивают тело на нить, постепенно меняя точки прикрепления нити к телу. В том случае, когда тело находится в равновесии, то центр тяжести тела будет лежать на линии, которая совпадает с линией нити. В противном случае сила тяжести приводит тело в движение.
Возьмите карандаш и линейку, начертите вертикальные прямые, которые визуально будут совпадать с нитевыми направлениями (нити, закрепляемые в различных точках тела). Если форма тела достаточно сложная, то проведите несколько линий, которые будут пересекаться в одной точке. Она и станет центром тяжести для тела, над которым вы производили опыт.
Центр тяжести треугольника
Для нахождения центра тяжести треугольника, необходимо нарисовать треугольник – фигуру, состоящую из трех отрезков, соединенных между собой в трех точках. Перед тем, как найти центр тяжести фигуры, необходимо, используя линейку, измерить длину одной стороны треугольника. В середине стороны поставьте отметку, после чего противоположную вершину и середину отрезка соедините линией, которая называется медианой. Тот же самый алгоритм повторите со второй стороной треугольника, а затем и с третьей. Результатом вашей работы станут три медианы, которые пересекаются в одной точке, которая будет являться центром тяжести треугольника.
Если перед вами стоит задача, касающаяся того, как найти центр тяжести тела в форме равностороннего треугольника, то необходимо из каждой вершины провести высоту с помощью прямоугольной линейки. Центр тяжести в равностороннем треугольнике будет находиться на пересечении высот, медиан и биссектрис, поскольку одни и те же отрезки одновременно являются высотами, медианами и биссектрисами.
Координаты центра тяжести треугольника
Перед тем, как найти центр тяжести треугольника и его координаты, рассмотрим подробнее саму фигуру. Это однородная треугольная пластина, с вершинами А, В, С и соответственно, координатами: для вершины А - x1 и y1; для вершины В - x2 и y2; для вершины С - x3 и y3. При нахождении координат центра тяжести мы не будем учитывать толщину треугольной пластины. На рисунке ясно видно, что центр тяжести треугольника обозначен буквой Е – для его нахождения мы провели три медианы, на пересечении которых и поставили точку Е. Она имеет свои координаты: xE и yE.
Один конец медианы, проведенной из вершины А к отрезку В, обладает координатами x 1 , y 1 , (это точка А), а вторые координаты медианы получаем, исходя из того, что точка D (второй конец медианы) стоит посередине отрезка BC. Концы данного отрезка обладают известными нам координатами: B(x 2 , y 2) и C(x 3 , y 3). Координаты точки D обозначаем xD и yD . Исходя из следующих формул:
х=(Х1+Х2)/2; у=(У1+У2)/2
Определяем координаты середины отрезка. Получим следующий результат:
хd=(Х2+Х3)/2; уd=(У2+У3)/2;
D *((Х2+Х3)/2 , (У2+У3)/2).
Мы знаем, какие координаты характерны для концов отрезка АД. Также нам известны координаты точки Е, то есть, центра тяжести треугольной пластины. Также мы знаем, что центр тяжести расположен посередине отрезка АД. Теперь, применяя формулы и известные нам данные, мы можем найти координаты центра тяжести.
Таким образом, можно найти координаты центра тяжести треугольника, вернее, координаты центра тяжести треугольной пластины, учитывая то, что ее толщина нам неизвестна. Они равны среднему арифметическому однородных координат вершин треугольной пластины.
Определение центра тяжести произвольного тела путем последовательного сложения сил, действующих на отдельные его части,- трудная задача; она облегчается только для тел сравнительно простой формы.
Пусть тело состоит только из двух грузов массы и , соединенных стрежнем (рис. 125). Если масса стержня мала по сравнению с массами и , то ею можно пренебречь. На каждую из масс действуют силы тяжести, равные соответственно и ; обе они направлены вертикально вниз, т. е. параллельно друг другу. Как мы знаем, равнодействующая двух параллельных сил приложена в точке , которая определяется из условия

Рис. 125. Определение центра тяжести тела, состоящего из двух грузов
Следовательно, центр тяжести делит расстояние между двумя грузами в отношении, обратном отношению их масс. Если это тело подвесить в точке , оно останется в равновесии.
Так как две равные массы имеют общий центр тяжести в точке, делящей пополам расстояние между этими массами, то сразу ясно, что, например, центр тяжести однородного стержня лежит в середине стержня (рис. 126).
Поскольку любой диаметр однородного круглого диска делит его на две совершенно одинаковые симметричные части (рис. 127), то центр тяжести должен лежать на каждом диаметре диска, т. е. в точке пересечения диаметров - в геометрическом центре диска . Рассуждая сходным образом, можно найти, что центр тяжести однородного шара лежит в его геометрическом центре, центр тяжести однородного прямоугольного параллелепипеда лежит на пересечении его диагоналей и т. д. Центр тяжести обруча или кольца лежит в его центре. Последний пример показывает, что центр тяжести тела может лежать вне тела.

Рис. 126. Центр тяжести однородного стержня лежит в его середине

Рис. 127. Центр однородного диска лежит в его геометрическом центре
Если тело имеет неправильную форму или если оно неоднородно (например, в нем есть пустоты), то расчет положения центра тяжести часто затруднителен и это положение удобнее найти посредством опыта. Пусть, например, требуется найти центр тяжести куска фанеры. Подвесим его на нити (рис. 128). Очевидно, в положении равновесия центр тяжести тела должен лежать на продолжении нити, иначе сила тяжести будет иметь момент относительно точки подвеса, который начал бы вращать тело. Поэтому, проведя на нашем куске фанеры прямую, представляющую продолжение нити, можем утверждать, что центр тяжести лежит на этой прямой.
Действительно, подвешивая тело в разных точках и проводя вертикальные прямые, мы убедимся, что все они пересекутся в одной точке. Эта точка и есть центр тяжести тела (так как он должен лежать одновременно на всех таких прямых). Подобным образом можно определить положение центра тяжести не только плоской фигуры, но и более сложного тела. Положение центра тяжести самолета определяют, вкатывая его колесами на платформы весов. Равнодействующая сил веса, приходящихся на каждое колесо, будет направлена по вертикали, и найти линию, по которой она действует, можно по закону сложения параллельных сил.

Рис. 128. Точка пересечения вертикальных линий, проведенных через точки подвеса и есть центр тяжести тела
При изменении масс отдельных частей тела или при изменении формы тела положение центра тяжести меняется. Так, центр тяжести самолета перемещается при расходовании горючего из баков, при загрузке багажа и т. п. Для наглядного опыта, иллюстрирующего перемещение центра тяжести при изменении формы тела, удобно взять два одинаковых бруска, соединенных шарниром (рис. 129). В том случае, когда бруски образуют продолжение один другого, центр тяжести лежит на оси брусков. Если бруски согнуть в шарнире, то центр тяжести оказывается вне брусков, на биссектрисе угла, который они образуют. Если на один из брусков надеть дополнительный груз, то центр тяжести переместится в сторону этого груза.

Рис. 129. а) Центр тяжести соединенных шарниром брусков, расположенных на одной прямой, лежит на оси брусков, б) Центр тяжести согнутой системы брусков лежит вне брусков
81.1. Где находится центр тяжести двух одинаковых тонких стержней, имеющих длину 12 см и скрепленных в виде буквы Т?
81.2. Докажите, что центр тяжести однородной треугольной пластины лежит на пересечении медиан.

Рис. 130. К упражнению 81.3
81.3. Однородная доска массы 60 кг лежит на двух опорах, как показано на рис. 130. Определите силы, действующие на опоры.
Центром тяжести твердого тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела (рисунок 1.6).
Радиус-вектор этой точки

Рисунок 1.6
Для однородного тела положение центра тяжести тела не зависит от материала, а определяется геометрической формой тела.
Если удельный вес однородного тела γ , вес элементарной частицы тела
P k = γΔV k (P = γV ) подставить в формулу для определения r C , имеем
Откуда, проецируя на оси и переходя к пределу, получаем координаты центра тяжести однородного объема

Аналогично для координат центра тяжести однородной поверхности площадью S (рисунок 1.7, а)


Рисунок 1.7
Для координат центра тяжести однородной линии длиной L (рисунок 1.7, б)

Способы определения координат центра тяжести
Исходя из полученных ранее общих формул, можно указать способы определения координат центров тяжести твердых тел:
1 Аналитический (путем интегрирования).
2 Метод симметрии . Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3 Экспериментальный (метод подвешивания тела).
4 Разбиение . Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S 1 и S 2 (S = S 1 + S 2 ). Центры тяжести этих фигур находятся в точках C 1 (x 1 , y 1 ) и C 2 (x 2 , y 2 ) . Тогда координаты центра тяжести тела равны


Рисунок 1.8
5Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры (рисунок 1.9):


Рисунок 1.9
Центры тяжести простейших фигур
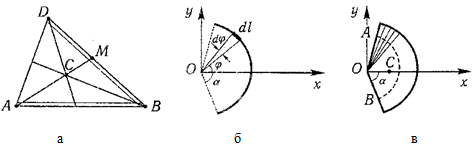
Рисунок 1.10
1 Треугольник
Центр тяжести площади треугольник совпадает с точкой пересечения его медиан (рисунок 1.10, а).
DM = MB , CM = (1/3)AM .
2 Дуга окружности
Дуга имеет ось симметрии (рисунок 1.10, б). Центр тяжести лежит на этой оси, т.е. y C = 0 .

dl – элемент дуги, dl = Rdφ , R – радиус окружности, x = Rcosφ , L = 2αR ,
Следовательно:
x C = R(sinα/α) .
3 Круговой сектор
Сектор радиуса R с центральным углом 2α имеет ось симметрии Ox , на которой находится центр тяжести (рисунок 1.10, в).
Разбиваем сектор на элементарные секторы, которые можно считать треугольниками. Центры тяжести элементарных секторов располагаются на дуге окружности радиуса (2/3)R .
Центр тяжести сектора совпадает с центром тяжести дуги AB :

14. Способы задания движения точки.
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
При координатном способе задания движения задаются координаты точки как функции времени:

Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t . Чтобы записать ее уравнение в явной форме, надо исключить из них t .
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t) . Этим способом удобно пользоваться, если траектория точки заранее известна.
15. 1.2 Скорость точки
Рассмотрим перемещение точки за малый промежуток времени Δt :
![]()
средняя скорость точки за промежуток времени Dt . Скорость точки в данный момент времени


Скорость точки – это кинематическая мера ее движения, равная производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета. Вектор скорости направлен по касательной к траектории точки в сторону движения.
Рекомендуем также
 Бинбанк аренда банковской ячейки
Бинбанк аренда банковской ячейки
 Где самые высокие ставки по вкладам в банках
Где самые высокие ставки по вкладам в банках
 Форма акта осмотра открытых рвов и котлованов под фундаменты
Форма акта осмотра открытых рвов и котлованов под фундаменты
 Плюсы и минусы кредитной «золотой карты»
Плюсы и минусы кредитной «золотой карты»
 Автоплатеж ЖКХ в Сбербанке — подключение, отключение
Автоплатеж ЖКХ в Сбербанке — подключение, отключение
 Дисциплинарное взыскание по ТК РФ – виды, сроки и правила наложения
Дисциплинарное взыскание по ТК РФ – виды, сроки и правила наложения